Comprendre les données géographiques
Résumé de section
-
L'utilisation des données géospatiales connaît actuellement une croissance considérable. Elle joue un rôle de plus en plus important dans les domaines comme les services publics, l'environnement, l'urbanisme, la recherche, la gestion des ressources naturelles, la santé, l'administration des biens foncier, les réseaux de transport et d'énergie, etc.
Cette initiation vous permet d'avoir des notions basiques autour des données géospatiales : données vectorielles et matricielles (aussi appelées raster), formats courants et applications. Sont aussi évoqués des programmes de satellites d'observation et de surveillance de la Terre, la technologie LiDAR et les modèles MNT et MNE (Modèle Numérique du Terrain et d’Élévation). Enfin un diagramme évoque quelques pistes pour trouver les données géospatiales en accès libre.
Objectifs
- Connaître les bases des données géospatiales
- Comprendre les types de données géospatiales et leurs applications
- Connaitre les principales plateformes des données géospatiales

Ce cours est en libre accès !
Aucune création de compte ou d'inscription n'est nécessaire, toutefois vous ne pourrez le parcourir qu'en lecture seule.
Pour participer aux activités (exercices, forum...), vous devez vous inscrire au cours
S'inscrire au cours -
Temps de lecture : 7min
-
Une donnée géospatiale est une information qu'il est possible de situer à la surface du globe terrestre.
On retrouvera indifféremment tous ces termes dans la littérature :
- données localisées ou géolocalisées
- données géographiques
- données spatiales ou géospatiales
 NASA/EPIC, edit by Tdadamemd, Public domain, via Wikimedia Commons
NASA/EPIC, edit by Tdadamemd, Public domain, via Wikimedia CommonsNéanmoins, les spécialistes ont plutôt tendance à utiliser les termes "données géolocalisées" et "données géospatiales".
Désignation :
- Géo : la Terre
- Locus : le lieu
- Espace : étendue indéfinie
-
Comment définit-on une localisation ?
Il y a plusieurs façons de définir une localisation :
 Maschen, CC0, via Wikimedia Commons
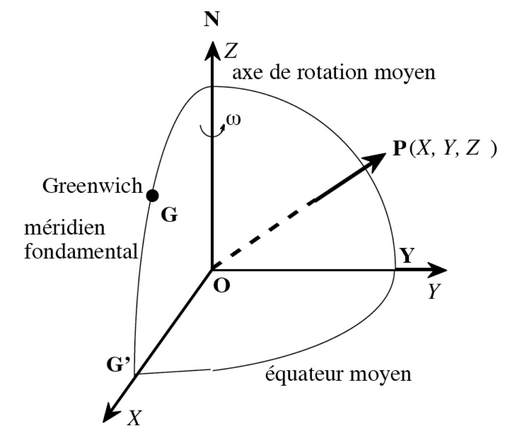
Maschen, CC0, via Wikimedia CommonsEn coordonnées sur la sphère
Il est possible de déterminer la position d'un objet par la localisation avec des coordonnées u et v sur la sphère, contenue dans un repère XYZ.
C'est ce système qui est utilisé pour la navigation maritime ou aérienne, avec des angles formés entre la position de l'objet considéré, le centre de gravité de la terre et l'Équateur ou le méridien de Greenwich. Cette méthode a été démocratisée par le GPS qui équipe à présent nos voitures et nos téléphones portables.
 Maschen, CC0, via Wikimedia Commons
Maschen, CC0, via Wikimedia CommonsEn coordonnées sur le plan
Il est aussi possible de déterminer la position d'un objet sur le plan, dans le cas de la lecture d'une carte routière ou topographique, avec des coordonnées en XY, et parfois l'altimétrie Z.
-
 Steve Stuck, Public domain, via Wikimedia Commons
Steve Stuck, Public domain, via Wikimedia CommonsAvec une adresse postale
Il est possible de géolocaliser certains éléments tels que des personnes ou des bâtiments par exemple à l'aide d'une adresse postale.
L'adresse postale est couramment utilisée par le grand public mais présente des inconvénients qui rendent parfois complexe sa conversion en coordonnées géographiques (procédé appelé géocodage, voir ci-dessous).
 Emily Brouwer (Mount Rainier National Park), CC-BY-2.0 via Wikimedia Commons
Emily Brouwer (Mount Rainier National Park), CC-BY-2.0 via Wikimedia CommonsPar rapport à un point connu
Lors d'une fouille archéologique par exemple, un quadrillage est réalisé sur tout le chantier. La position de chaque maille est relevée et en mesurant les distances séparant l'objet du quadrillage, il est possible de le repérer sur la grille.
Les mesures seront alors faites en système local, ce dernier pourra être raccordé à un système de coordonnées ultérieurement à l'aide de points connus en coordonnées.
-
Informations géographiques
Ces informations relevées sont "analogiques", c’est-à-dire qu'elles sont réelles mais nécessitent deux points d’attention pour les exploiter : les métadonnées et la modélisation.
Les métadonnées
Par exemple, dans le cas d'une fouille archéologique, les archéologues relèvent différentes métadonnées telles que :
- le contexte des fouilles,
- les méthodes utilisées pour relever les données,
- la localisation,
- le type d'information.
Toutes ces informations sont des métadonnées. La localisation (les coordonnées) est une métadonnée.
Les données seules ont peu de sens ! Sans les métadonnées, les données n'auront que peu de valeur car elles sont difficilement exploitables.
La modélisation
Pour pouvoir utiliser toutes ces données et métadonnées dans un système d'information géographique (SIG), il est nécessaire de les numériser, puisque les systèmes d'information sont des systèmes numériques.
Cette étape de modélisation est importante car elle permet :
- de simplifier l'information,
- de la quantifier (c'est-à-dire de la faire rentrer dans des échelles de valeurs qui permettent la comparaison entre plusieurs relevés),
- de faire des regroupements thématiques (ce qui nous permettra peut-être de constituer des couches contenant des objets similaires),
- et de faire correspondre cette information à un modèle de données standardisé qui permettra ultérieurement la lecture et les échanges de données.
 Jørgen Stamp, CC BY 2.5 DK, via Wikimedia Commons
Jørgen Stamp, CC BY 2.5 DK, via Wikimedia Commons -
Comment peut-on localiser une information géographique ?
Par géocodage
En relevant une adresse : cette information sera géocodée par la suite, c’est-à-dire convertie en coordonnées géographiques. Par exemple, en France, le site adresses.data.gouv.fr permet de passer d'une adresse à des coordonnées géographiques.
 ex. Pyramide du Louvre / adresse.data.gouv.fr]
ex. Pyramide du Louvre / adresse.data.gouv.fr]Par jointure
Il est aussi possible de faire une jointure entre entités géographiques qui partagent une nomenclature commune. Par exemple, si le travail se fait à l'échelle de la commune et que les données sont liées aux codes Insee des communes étudiées, il est possible de joindre les données relevées sous forme de table avec les données géographiques de ces communes, tel que les contours communaux ou la position des chef-lieux.
 Nicolas Roelandt, Univ. Eiffel. Domaine public
Nicolas Roelandt, Univ. Eiffel. Domaine public -
Deux types d'information géographique
L’information géographique peut être de deux types :
Information discrète
Ce sont des phénomènes que l'on peut qualifier de "finis". Par exemple sur l'image en bas, les bâtiments ont un contour bien précis.
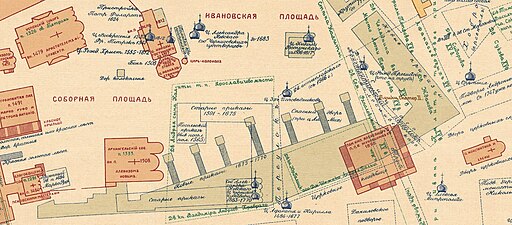 Bartenev, Public domain, via Wikimedia Commons
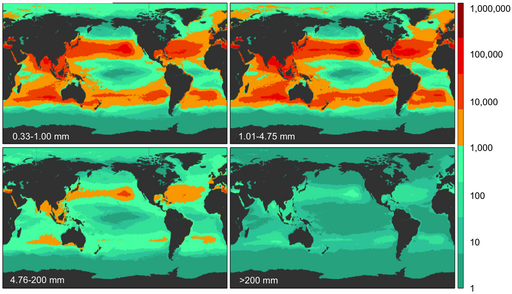
Bartenev, Public domain, via Wikimedia CommonsInformation continue
Ce sont des phénomènes dont le début ou la fin ne pourront pas être délimitées précisément. C'est le cas par exemple pour les mesures physiques comme la température ou les quantités de polluants atmosphériques, comme le montre la figure ci-dessous.
Comment mesurer ces phénomènes ?
Ils peuvent être mesurés :
- soit de manière physique (de manière directe avec un capteur sur place ou de manière indirecte à l’aide d’un satellite).
- soit par le biais d'un inventaire : en se déplaçant sur le site étudié et en réalisant un inventaire botanique ou faunistique.
- soit encore, par le biais de réponses à des questionnaires.
-
Les deux modèles les plus courants
Pour être exploitable dans un SIG, l'information spatiale doit correspondre à des modèles de données propres au domaine.
Les deux modèles les plus courants, et les plus fréquemment utilisés, sont :
Les données vectorielles
Les données vectorielles sont ici illustrées par les points, lignes et polygones.
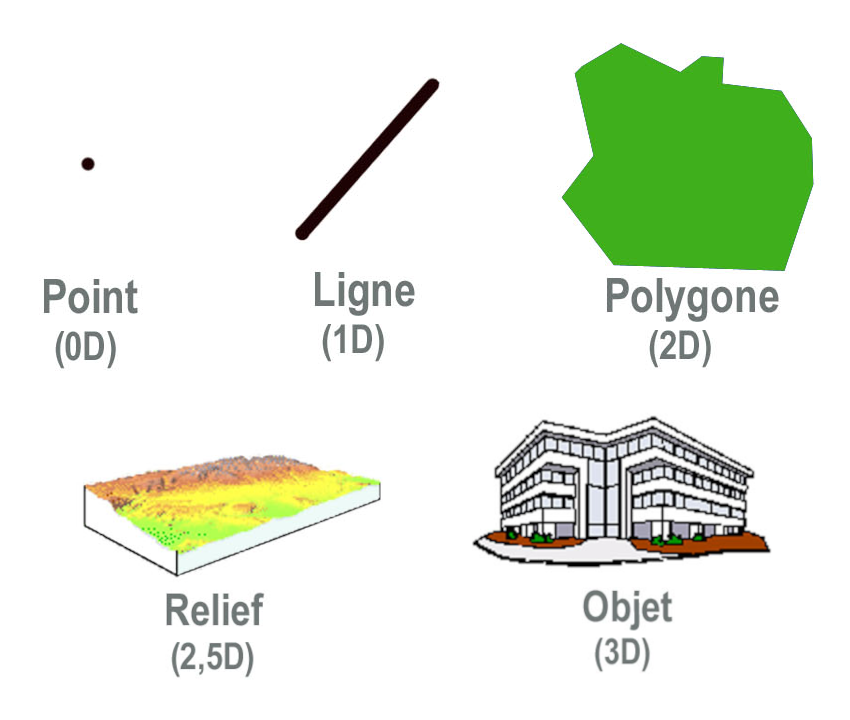 F Lamiot d'après [1] (GNUFDL), CC BY-SA 3.0, via Wikimedia Commons
F Lamiot d'après [1] (GNUFDL), CC BY-SA 3.0, via Wikimedia CommonsLes données raster
Les données raster sont proches des photographies numériques où chaque pixel de l'image porte une information.
D'autres modèles de données existent mais sont d'usage moins courant tels que les modèles topologiques ou les réseaux ou graphes.
-
Temps de lecture : 15min
-
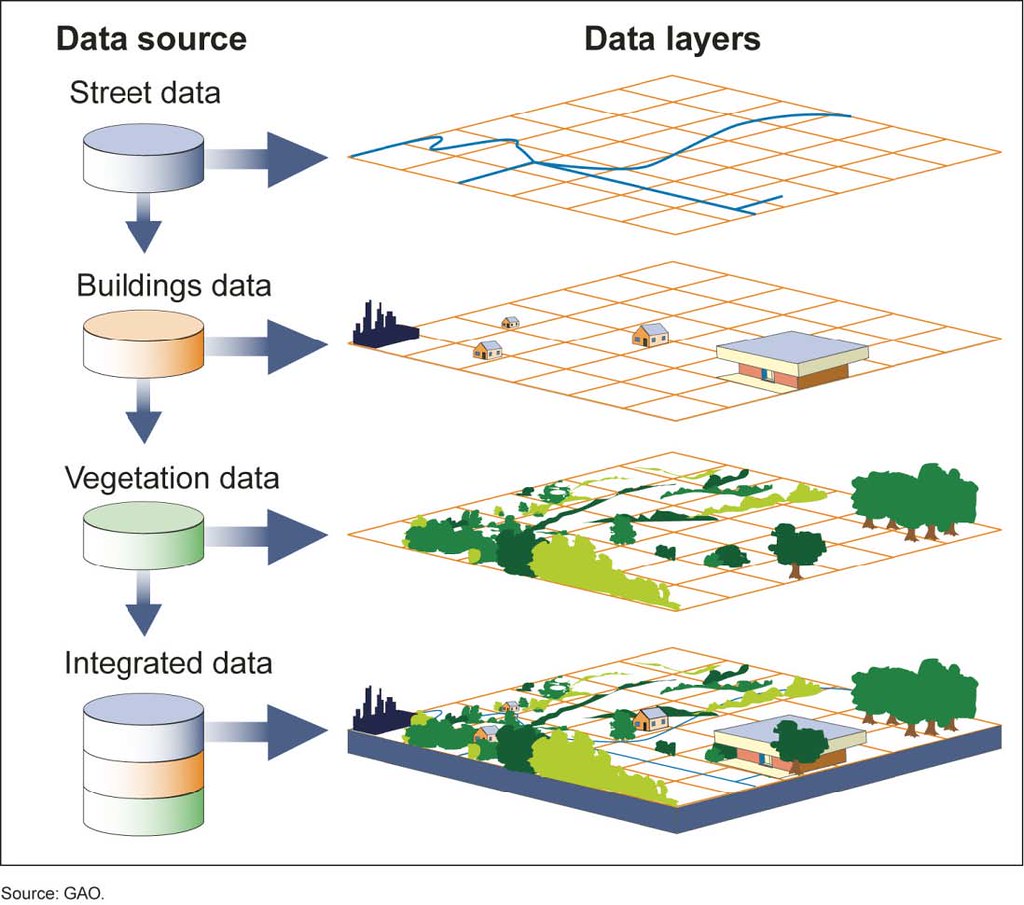
Comme nous avons pu le voir dans la section précédente, l’information mesurée sur le terrain doit être numérisée afin de pouvoir être stockée et exploitée par des ordinateurs.
Il existe deux grandes familles de données qui ont chacune leurs particularités et leurs usages:
- Les données raster constituées de grilles de pixel dont chaque cellule est porteuse d’une information.
- Les données vectorielles constituées de points, lignes ou polygones dont les coordonnées des sommets sont connus et auxquels de l’information est attachée.
 Johannes Rössel, CC BY-SA 3.0, via Wikimedia Commons
Johannes Rössel, CC BY-SA 3.0, via Wikimedia CommonsSelon les besoins, le (ou la) géomaticien(ne) peut utiliser des données vectorielles ou des données raster. Il est fréquent de manipuler des données de plusieurs types. Il existe également des formats de données géospatiales répondre à des besoins particuliers qui diffèrent de ces deux grandes familles.
-
Données vectorielles
Les données vectorielles sont adaptées pour des phénomènes ponctuels ou discrets tels que des points d’intérêts, des contours administratifs ou les axes de communication. Elles associent à chaque entité (Feature) une forme (shape) dont le (ou les) sommet(s) est connu en coordonnées et des données sous forme de table.
Forme Géométrie Modèle Simple Features Modèle OpenStreetMap 
Les points n’ont pas de dimensions et leurs coordonnées sont connus (latitude/longitude ou X/Y selon le système de référence de coordonnées).Sommet (vertex) Point Noeud (node) 
Les lignes (ou polylignes) sont constituées de points dans un ordre défini. Les points forment les sommets de la polyligne. Il est possible de calculer la longueur d’une polyligne.Arête (edge) Ligne (Linestring) Way 
Un polygone est une polyligne fermée, c’est-à-dire que le point de départ et le point d’arrivée ont les mêmes coordonnées. Les sommets du polygone est constitués de points. Il est possible de calculer son périmètre et sa surface.Face Polygone (Polygon) Closed way
Il est possible de modifier des données vectorielles en les découpant, en ajoutant ou supprimant des sommets. On peut personnaliser l'affichage des données vectorielles en faisant varier l’épaisseur des traits, les couleurs, etc.
Les formats les plus courants sont le shapefile (.shp), le Geopackage (.gpkg), le GeoJSON (.json) ou encore le csv. Ces formats implémentent le modèle Simple Feature Access, un standard défini par l’Open Geospatial Consortium.
Le projet OpenStreetMap utilise son propre modèle basé sur le XML, de nombreux outils permettent de convertir ces données vers le modèle Simple Feature Access. Le KML, un autre format basé sur du XML, a été popularisé par l’outil Google Earth.
-
Données raster
Les données raster sont bien adaptées pour l’étude de la variation de phénomènes continus (température de l’eau, altimétrie, enneigement, mode d’occupation des sols, etc.) sur des grandes surfaces. Les exemples les plus fréquents sont les images aériennes ou satellites, les mode d’occupation des sols ou les modèles numériques de terrain/ d’élévation.
 Exemple de suivi d'un phénomène continu. Source : Sécheresse continentale 2022, CESBIO
Exemple de suivi d'un phénomène continu. Source : Sécheresse continentale 2022, CESBIOL’utilisation de données raster peut servir dans plusieurs domaines :
- mesure d'impact et évaluation des risques (sécheresse, incendie) ;
- suivi de la déforestation ou de la fonte des glaces ;
- détection et suivi de pollutions.
Les données raster sont des grilles régulières constituées de cellules de taille identique dont la position est connue. Chaque cellule porte une information, par exemple l’altimétrie ou la réflectance dans une certaine longueur d’onde du spectre électromagnétique.
- mesure d'impact et évaluation des risques (sécheresse, incendie) ;
-
Caractéristiques importantes pour décrire les données raster
Une image raster est définie par plusieurs éléments qui vous sont présentés ci-dessous.
Résolution spatiale
La résolution spatiale correspond à la taille sur le terrain d’un pixel. Par exemple, pour une image prise par un satellite Sentinel-2, la résolution spatiale dans le visible est de 10 mètres. C’est-à-dire qu’un pixel d’une image correspond à un carré de 10 mètres par 10 mètres au sol.
 Comparaison de différentes résolutions spatiales. Source : applisat.fr
Comparaison de différentes résolutions spatiales. Source : applisat.frRésolution temporelle
La résolution temporelle est le temps entre deux prises de vues. Pour les satellites de la constellation Sentinel-2, la résolution temporelle est de 5 jours. C’est-à-dire qu’un endroit sera survolé tous les 5 jours par un satellite de cette constellation, ce qui est très régulier et permet de se rendre compte rapidement des changements (inondations, incendies).
 L'évolution de la banquise du pôle nord entre 1979 et 2007. Source : National Snow and Ice Data Center
L'évolution de la banquise du pôle nord entre 1979 et 2007. Source : National Snow and Ice Data CenterFauchée
La fauchée est la largeur de la prise de vue. Pour Sentinel-2, elle est de 290 km alors que pour Landsat-8 elle est de 185 km. Les fauchées étant de plus en plus grandes et les capteurs de plus en plus précis, les images sont de plus en plus volumineuses, atteignant plusieurs giga octets.
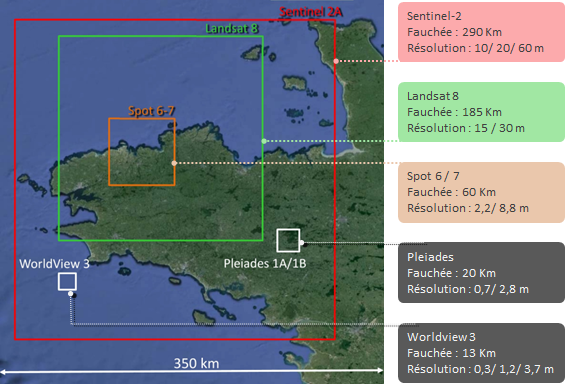
Comparaison de différentes fauchées. Source : https://www.un-autre-regard-sur-la-terre.org/
Résolution spectrale / Bandes
La résolution spectrale correspond à la finesse des canaux du spectre électro-magnétique que le capteur enregistrera. En effet, certaines longueurs d’ondes du spectre électromagnétique sont absorbées par l’atmosphère terrestre et ne sont donc pas visibles depuis l’espace. Lors de la conception du capteur, les bandes correspondant à une certaine fraction du spectre électromagnétique sont sélectionnées en fonction des applications recherchées. Ces bandes peuvent ensuite être combinées pour la création de compositions colorées ou le calcul d’indices (santé de la végétation, détection d’incendies, etc.).
Ainsi les images issues du programme Sentinel-2 disposent de 12 bandes:
- B1 : pour la détection des aérosols
- B2 (bleu), B3 (vert) et B4 (rouge) pour les images en lumière visible
- B5 à B8a dans les rouges et proche-infrarouge pour l’étude de la végétation
- B9 : détection de la vapeur d’eau dans l’atmosphère
- B10 : détection des nuages
- B11 et B12 : différenciation entre la neige, la glace et les nuages
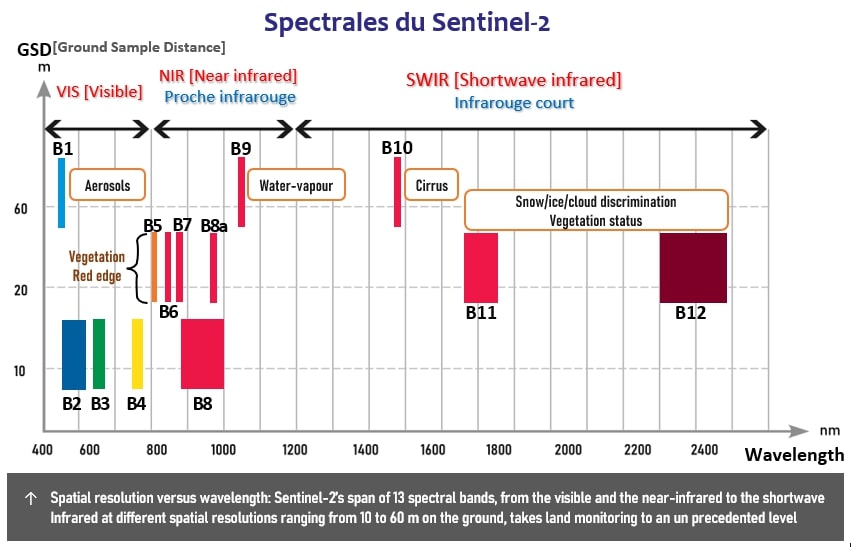 Bandes spectrales de Sentinel-2 - Source : European Space Agency
Bandes spectrales de Sentinel-2 - Source : European Space AgencyLes bandes occupent une largeur différente du spectre électromagnétique. Ainsi les bandes B5 et B6 couvrent une bande de 15 et 13 nanomètres respectivement, alors que B12 couvre 184 nanomètres. C’est cette largeur qui est appelée résolution spectrale.
Chaque image sera composée d'une ou plusieurs bandes. Les bandes pourront être stockées dans un seul fichier ou il peut y avoir un fichier par bande.
Les formats les plus courants sont :
- le geoTIFF (.TIFF),
- l’ESRI ASCII (.ASC)
- le .XYZ
-
Temps de lecture : 5min
-
Savoir manipuler des données géographiques est une chose, savoir où les trouver en est une autre. Le diagramme ci-dessous propose quelques questions à se poser et quelques pistes à explorer.
Vous pouvez afficher cette infographie en plein écran en cliquant sur ce symbole se trouvant en haut à droite

Logigramme adapté de Milan Bonté (2022, 28 février). Trouver et télécharger des données géolocalisées ? Du béton et des plumes. Consulté le 13 juin 2024, à l’adresse https://doi.org/10.58079/lx8r
-
-
-
Systèmes géodésiques
Il s'agit de systèmes où les coordonnées (latitude et longitude) sont des angles formés entre le centre de la Terre, l'Équateur et le premier méridien (ou méridien de Greenwich).
Ces angles sont exprimés en degrés, minutes, secondes ou en degrés décimaux.
Ces points sont rattachés à un ellipsoïde de révolution, similaire à une sphère aplatie aux pôles, chargé d'approximer la surface terrestre.
Une troisième coordonnée, la hauteur ellipsoïdale est la différence entre le point considéré et l'ellipsoïde. Il ne s'agit pas d'une altitude, elle peut différer de plusieurs dizaines de mètres.
 The original uploader was Carlo denis at French Wikipedia., CC BY-SA 3.0, via Wikimedia Commons
The original uploader was Carlo denis at French Wikipedia., CC BY-SA 3.0, via Wikimedia CommonsLes systèmes de navigation par satellites utilisent un système géodésique, c'est le cas du GPS américain qui repose sur le WGS 84.
-
Systèmes cartographiques (aussi appelés projections)
Les systèmes de coordonnées projetées permettent la représentation de points situés à la surface terrestre sur une surface plane.
Cette opération, appelée transformation, engendre des déformations. Le travail du cartographe est de choisir la plus adaptée, selon que la carte devra préserver les angles, les distances, les surfaces ou rien de tout cela.
Projections conformes
Les projections conformes préservent les angles, facilitant la navigation entre deux points. C'est le cas de la projection Transverse universelle de Mercator (Universal Transverse Mercator ou UTM) par exemple. Cette projection est encore très utilisée puisqu'une variante dédiée aux applications cartographiques web a été créée, la projection Web Mercator. Bien qu'omniprésente sur les services de cartographies en ligne tels qu'OpenStreetMap ou Google Maps, elle n'est pas exempte des défauts de sa grande sœur (voir ci-dessous le passage sur la visualisation des déformations induites par la projection Mercator).

 Projection de Peters de la Terre. Mdf, Public domain, via Wikimedia Commons
Projection de Peters de la Terre. Mdf, Public domain, via Wikimedia CommonsProjections équivalentes
Les projections équivalentes préservent les surfaces, ce qui les rendent utiles pour des comparaisons de densité par exemple. Ainsi, la projection de Gall-Peters montre un Groënland 14 fois plus petit que le continent africain, contrairement à la projection UTM, ce qui correspond à la réalité.
Projections équidistantes
Les projections équidistantes préservent les distances mais ne conservent ni les angles ni les surfaces.
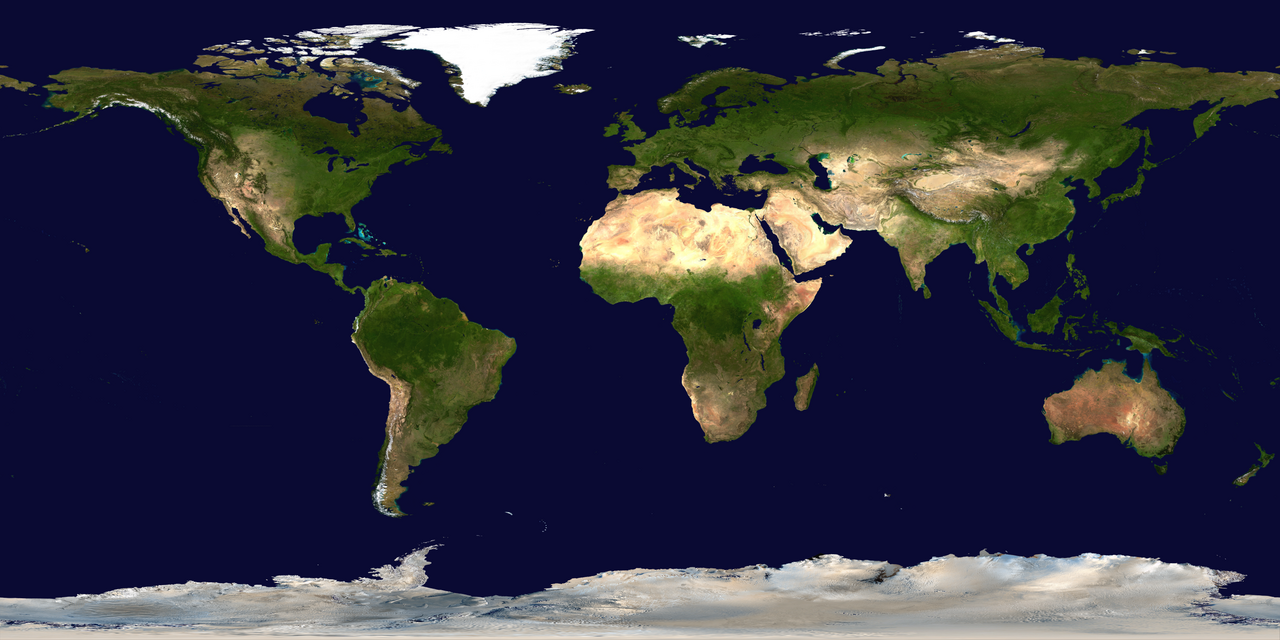 Projection équirectangulaire de la Terre. NASA
Projection équirectangulaire de la Terre. NASA -
Visualiser les déformations avec les indicatrices de Tissot
Comme nous l'avons vu précédemment, toutes les projections déforment la réalité. Il peut être intéressant de visualiser ces déformations pour mieux s'en rendre compte. C'est ce que permettent les indicatrices de Tissot.
Les deux images ci-dessous représentent la même chose : des surfaces appelées indicatrices de Tissot. Elles servent à visualiser les déformations produites par une projection.
L'image de gauche représente ces indicatrices réparties régulièrement autour du globe. Tous les cercles font la même taille. L'image de droite reprend les mêmes cercles mais sur une carte utilisant la projection universelle transverse de Mercator: les cercles grossissent plus leur latitude augmente (vers les pôles).

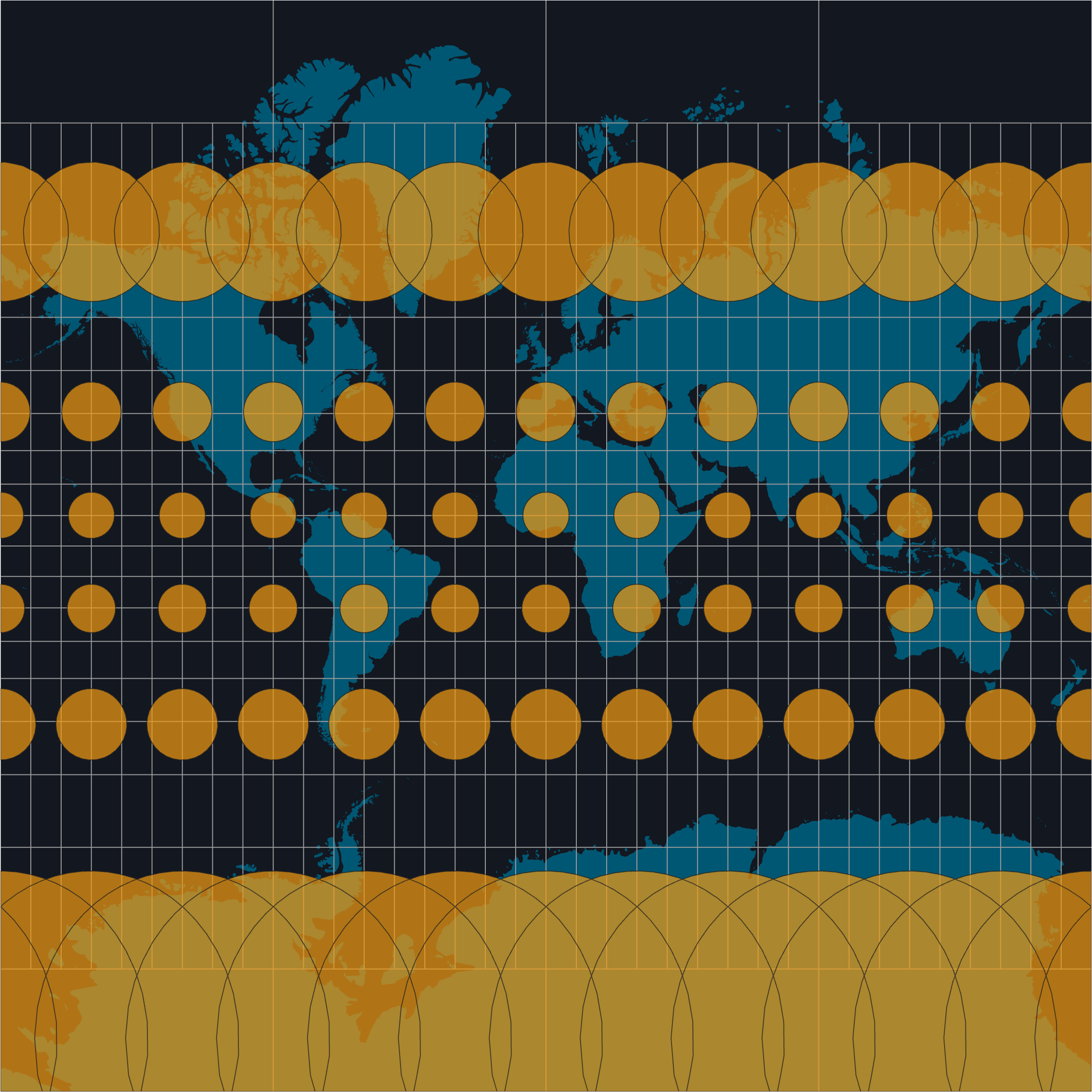 World Map (Canvas) with Tissot’s Indicatrices - Sorami Hisamoto, Observable
World Map (Canvas) with Tissot’s Indicatrices - Sorami Hisamoto, ObservableLa NASA propose de visualiser les déformations de différentes projections dans cette vidéo de 47 secondes.
Map Projections Morph - NASA Scientific Visualization Studio, on YouTube
-
Pour des raisons historiques, esthétiques ou de représentation, d'autres projections peuvent être choisies (projections de Fuller, de Bonne ou Goode par exemple).
Un cartographe qui travaille sur les océans mondiaux saura utiliser à son avantage la superbe projection de Spilhaus.
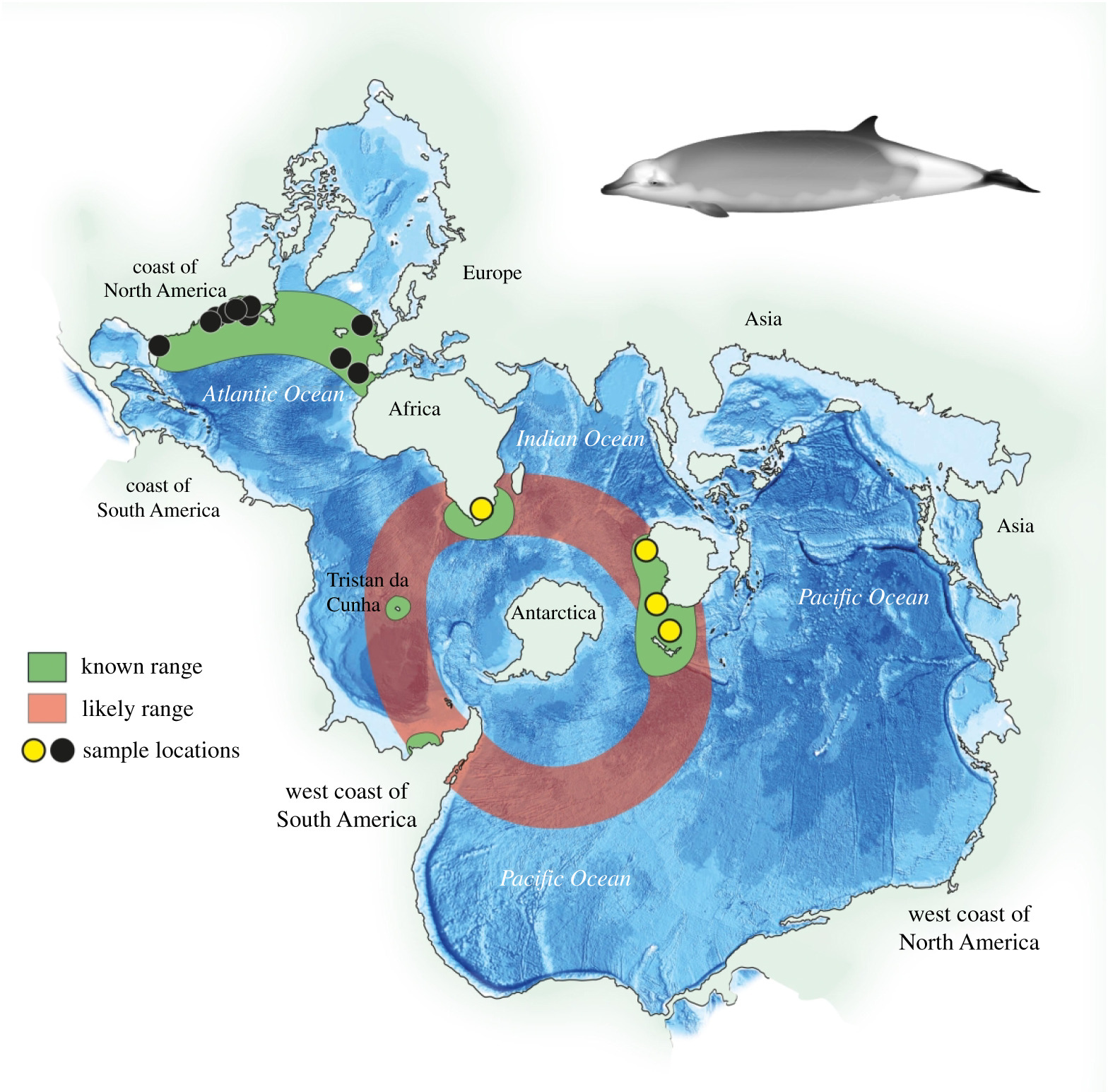 Carte d'échantillonnage de baleines à bec utilisant la projection de Splihaus.
Carte d'échantillonnage de baleines à bec utilisant la projection de Splihaus.
Source: Vivian Ward, CC BY-SA 4.0, via Wikimedia Commons -
Europe
ETRS89-extended / LAEA Europe : projection utilisée pour les données géographiques Eurostat de la Commission Européenne.
Code EPSG:3035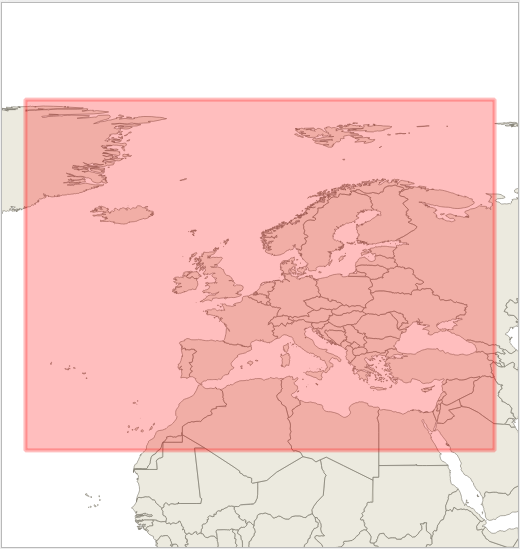
Monde
WGS84: système de référence de coordonnées géographiques utilisés par le système GPS.
Code EPSG:4326WGS 84 / Pseudo-Mercator -- Spherical Mercator: projection utilisée par les fonds de cartes web (OpenStreetMap, Google maps, etc.).
Code ESPG:3857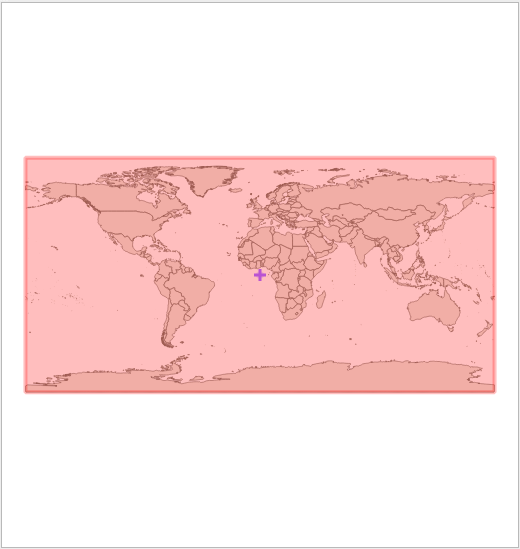
-
- Cours sur Callisto Introduction au monde des cartes
- Tutoriel QGIS de Julie Pierson (CNRS)
- Chaine Youtube Nicolas Lambert (CNRS)
- Cartographie : comment représenter le monde - Le dessous des cartes | ARTE
- Initiation à QGIS - Nicolas Roelandt (univ. Eiffel)
- Milan Bonté (2022, 28 février). Trouver et télécharger des données géolocalisées ? Du béton et des plumes. Consulté le 10 juin 2024, à l’adresse https://doi.org/10.58079/lx8r
-
Un forum est à votre disposition pour toute question. Vous pouvez aussi nous aider à améliorer ce cours en donnant votre avis.
